このページは、慶應理工アドベントカレンダー2021の15日目の記事です。
こちらのページの続きです。 分枝限定法によるスキャンマッチングのPythonによる実装を示します。 Pythonの実装はGitHubのリポジトリに置かれています(中の人が1から作っています)。
2次元の姿勢をPose2Dクラス、2次元の位置をPoint2Dクラスとして次のように定義します。 Pose2Dクラスのソースコードはこちら、Point2Dクラスのソースコードはこちらを参照してください。
class Point2D(object):
def __init__(self) -> None:
self.x = 0.0
self.y = 0.0
def __init__(self, x: float, y: float) -> None:
self.x = x
self.y = yproject_point_2d()関数は、ある姿勢のもとで、点の座標を変換します。 姿勢は引数pose、点の座標は引数pointにそれぞれ指定します。 例えば、poseがロボットの姿勢(地図座標系からLiDAR座標系への座標変換)、pointがLiDAR座標系におけるスキャン点の座標(直交座標)であれば、地図座標系におけるスキャン点の座標が返されます。
class Pose2D(object):
def __init__(self) -> None:
self.x = 0.0
self.y = 0.0
self.theta = 0.0
def __init__(self, x: float, y: float, theta: float) -> None:
self.x = x
self.y = y
self.theta = theta
def project_point_2d(pose: Pose2D, point: Point2D) -> Point2D:
"""Project a 2D point using a 2D pose"""
sin_theta = math.sin(pose.theta)
cos_theta = math.cos(pose.theta)
x = pose.x + cos_theta * point.x - sin_theta * point.y
y = pose.y + sin_theta * point.x + cos_theta * point.y
return Point2D(x, y)占有格子地図(Occupancy Grid Map)の実装(Grid2Dクラス)を示します。 Grid2Dクラスのソースコードはこちらを参照してください。 重要な部分だけを以下に列挙します。
resolution()メソッド、中心の座標はcenter_pos()メソッド、左下端(\((0, 0)\)番目の格子)の座標はmin_pos()メソッド、\(x\)と\(y\)方向の格子の数はnum_of_cells_x()、num_of_cells_y()メソッドからそれぞれ取得できます。flat_index()メソッドによって、リストにアクセスするための1次元のインデックスに変換できます。 分枝限定法によるスキャンマッチングの際は、占有確率の総和を取る必要があります。 占有確率が16ビット整数に量子化されているので、浮動小数点数の総和が整数の総和に置き換わって、多少の高速化を期待できます。index_to_point()メソッドは、指定された格子に対応する座標を返します。 point_to_index()メソッドはその逆で、指定された位置に対応する格子のインデックスを返します。get_index_value()とget_index_probability()メソッドは、指定された格子の占有確率を、16ビットの整数、あるいは浮動小数点数で返します。compute_coarse_map()関数は、以前のページにおける\(\mathcal{M}_\mathrm{precomp}^h\)を計算します。 引数win_sizeに\(2^h\)、grid_mapに占有格子地図\(\mathcal{M}\)を指定します。 計算にあたっては、占有確率の比較が繰り返し必要です。 占有確率が16ビット整数に量子化されているので、浮動小数点数の比較が整数の比較に置き換わって、多少の高速化を期待できます。 \[
\mathcal{M}_\mathrm{precomp}^h(i, j)
= \max_{\substack{i \le i' < i + 2^h \\ j \le j' < j + 2^h}} \mathcal{M}(i', j')
\]# coding: utf-8
# grid_2d.py
import math
from collections import deque
from typing import Callable, List, Tuple
from point_2d import Point2D
from pose_2d import Pose2D, project_point_2d
from util import bresenham
def probability_to_value(x: float) -> int:
return int(x * 65536.0)
def value_to_probability(x: int) -> float:
return float(x) / 65536.0
def probability_to_log_odds(x: float) -> float:
return math.log(x / (1.0 - x))
def log_odds_to_probability(x: float) -> float:
return 1.0 / (1.0 + math.exp(-x))
def probability_to_odds(x: float) -> float:
return x / (1.0 - x)
def odds_to_probability(x: float) -> float:
return x / (1.0 + x)
def log_odds_to_value(x: float) -> int:
return probability_to_value(log_odds_to_probability(x))
def value_to_log_odds(x: int) -> float:
return probability_to_log_odds(value_to_probability(x))
def probability_to_grayscale(x: float) -> int:
return 255 - int(x * 255.0)
def value_to_grayscale(x: int) -> int:
return 255 - (x >> 8)
class Grid2D(object):
"""Grid2D class represents a simple 2D grid map. Each grid cell contains
a quantized occupancy probability, which is incrementally updated by
Binary Bayes Filter."""
VALUE_MIN = 1
VALUE_MAX = 65535
PROBABILITY_MIN = value_to_probability(VALUE_MIN)
PROBABILITY_MAX = value_to_probability(VALUE_MAX)
LOG_ODDS_MIN = probability_to_log_odds(PROBABILITY_MIN)
LOG_ODDS_MAX = probability_to_log_odds(PROBABILITY_MAX)
def __init__(self, resolution: float, center_x: float, center_y: float,
num_of_cells_x: int, num_of_cells_y: int,
log_odds_hit: float, log_odds_miss: float) -> None:
assert num_of_cells_x > 0
assert num_of_cells_y > 0
assert Grid2D.LOG_ODDS_MIN <= log_odds_miss <= Grid2D.LOG_ODDS_MAX
assert Grid2D.LOG_ODDS_MIN <= log_odds_hit <= Grid2D.LOG_ODDS_MAX
self.__resolution = resolution
self.__min_x = center_x - resolution * num_of_cells_x / 2.0
self.__min_y = center_y - resolution * num_of_cells_y / 2.0
self.__center_x = center_x
self.__center_y = center_y
self.__num_of_cells_x = num_of_cells_x
self.__num_of_cells_y = num_of_cells_y
self.__log_odds_miss = log_odds_miss
self.__log_odds_hit = log_odds_hit
num_of_cells = num_of_cells_x * num_of_cells_y
self.__values = [Grid2D.VALUE_MIN for _ in range(num_of_cells)]
def resolution(self) -> float:
return self.__resolution
def num_of_cells_x(self) -> int:
return self.__num_of_cells_x
def num_of_cells_y(self) -> int:
return self.__num_of_cells_y
def log_odds_miss(self) -> float:
return self.__log_odds_miss
def log_odds_hit(self) -> float:
return self.__log_odds_hit
def shape(self) -> Tuple[int, int]:
return self.__num_of_cells_x, self.__num_of_cells_y
def min_pos(self) -> Tuple[float, float]:
return self.__min_x, self.__min_y
def center_pos(self) -> Tuple[float, float]:
return self.__center_x, self.__center_y
def flat_index(self, x: int, y: int) -> int:
return y * self.__num_of_cells_x + x
def is_index_inside(self, x: int, y: int) -> bool:
return 0 <= x < self.__num_of_cells_x and \
0 <= y < self.__num_of_cells_y
def is_point_inside(self, p: Point2D) -> bool:
return self.is_index_inside(*self.point_to_index(p))
def index_to_point(self, x: int, y: int) -> Point2D:
"""Compute the minimum coordinates in the map frame"""
return Point2D(self.__min_x + x * self.__resolution,
self.__min_y + y * self.__resolution)
def point_to_index(self, p: Point2D) -> Tuple[int, int]:
"""Compute the index from the coordinates in the map frame"""
idx_x = int((p.x - self.__min_x) // self.__resolution)
idx_y = int((p.y - self.__min_y) // self.__resolution)
return idx_x if p.x >= self.__min_x else idx_x - 1, \
idx_y if p.y >= self.__min_y else idx_y - 1
def point_to_index_float(self, p: Point2D) -> Tuple[float, float]:
"""Compute the index in the floating point in the map frame"""
idx_x = (p.x - self.__min_x) / self.__resolution
idx_y = (p.y - self.__min_y) / self.__resolution
return idx_x, idx_y
def get_index_value(self, x: int, y: int) -> int:
assert self.is_index_inside(x, y)
return self.__values[self.flat_index(x, y)]
def get_index_probability(self, x: int, y: int) -> float:
assert self.is_index_inside(x, y)
return value_to_probability(self.__values[self.flat_index(x, y)])
def get_point_value(self, p: Point2D) -> int:
return self.get_index_value(*self.point_to_index(p))
def get_point_probability(self, p: Point2D) -> float:
return self.get_index_probability(*self.point_to_index(p))
def get_neighbor_probabilities(self, p: Point2D):
x, y = self.point_to_index_float(p)
x0, y0 = int(x), int(y)
x1, y1 = x0 + 1, y0 + 1
dx, dy = x - x0, y - y0
x0_valid = 0 <= x0 < self.__num_of_cells_x
x1_valid = 0 <= x1 < self.__num_of_cells_x
y0_valid = 0 <= y0 < self.__num_of_cells_y
y1_valid = 0 <= y1 < self.__num_of_cells_y
m00 = self.get_index_probability(x0, y0) \
if x0_valid and y0_valid else 0.5
m01 = self.get_index_probability(x0, y1) \
if x0_valid and y1_valid else 0.5
m10 = self.get_index_probability(x1, y0) \
if x1_valid and y0_valid else 0.5
m11 = self.get_index_probability(x1, y1) \
if x1_valid and y1_valid else 0.5
interpolated = dy * (dx * m11 + (1.0 - dx) * m01) + \
(1.0 - dy) * (dx * m10 + (1.0 - dx) * m00)
return (x0, y0), (dx, dy), (m00, m01, m10, m11), interpolated
def get_interpolated_probability(self, p: Point2D) -> float:
return self.get_neighbor_probabilities(p)[3]
def set_index_value(self, x: int, y: int, value: int) -> None:
assert self.is_index_inside(x, y)
self.__values[self.flat_index(x, y)] = self.__clamp_value(value)
def set_index_probability(self, x: int, y: int, value: float) -> None:
assert self.is_index_inside(x, y)
self.__values[self.flat_index(x, y)] = \
self.__clamp_value(probability_to_value(value))
def set_point_value(self, p: Point2D, value: int) -> None:
self.set_index_value(*self.point_to_index(p), value)
def set_point_probability(self, p: Point2D, value: float) -> None:
self.set_index_probability(*self.point_to_index(p), value)
def __update_index_log_odds(self, x: int, y: int, value: float) -> None:
assert self.is_index_inside(x, y)
idx = self.flat_index(x, y)
log_odds = value_to_log_odds(self.__values[idx]) + value
self.__values[idx] = self.__clamp_value(log_odds_to_value(log_odds))
def update_index_hit(self, x: int, y: int) -> None:
self.__update_index_log_odds(x, y, self.__log_odds_hit)
def update_index_miss(self, x: int, y: int) -> None:
self.__update_index_log_odds(x, y, self.__log_odds_miss)
def update_point_hit(self, p: Point2D) -> None:
self.update_index_hit(*self.point_to_index(p))
def update_point_miss(self, p: Point2D) -> None:
self.update_index_miss(*self.point_to_index(p))
def update_from_scans(self, pose: Pose2D, scan: List[Point2D]) -> None:
pose_idx = self.point_to_index(Point2D(pose.x, pose.y))
points = [project_point_2d(pose, p) for p in scan]
scan_indices = [self.point_to_index(p) for p in points]
ray_indices = [bresenham(*pose_idx, *idx) for idx in scan_indices]
# hit_indices = [indices[-1] for indices in ray_indices]
for indices in ray_indices:
for missed_idx in indices[:-1]:
if self.is_index_inside(*missed_idx):
self.update_index_miss(*missed_idx)
if self.is_index_inside(*indices[-1]):
self.update_index_hit(*indices[-1])
def __clamp_value(self, x: int) -> int:
return max(Grid2D.VALUE_MIN, min(Grid2D.VALUE_MAX, x))
def to_bytes(self) -> bytes:
return bytes([value_to_grayscale(x) for x in self.__values])
def sliding_window_max(in_func: Callable[[int], int],
out_func: Callable[[int, int], None],
num_of_elements: int, win_size: int) -> None:
idx_queue, idx_in, idx_out = deque(), 0, 0
# Process the first `win_size` elements (first window)
while idx_in < win_size:
# Previous smaller elements are useless so remove them from `idx_queue`
while idx_queue and in_func(idx_in) >= in_func(idx_queue[-1]):
idx_queue.pop()
idx_queue.append(idx_in)
idx_in += 1
# `idx_queue[0]` contains index of the maximum element in the first window
# Process the rest of the elements here
while idx_in < num_of_elements:
# The element pointed by the `idx_queue[0]` is the maximum element of
# the previous window
out_func(idx_out, in_func(idx_queue[0]))
idx_out += 1
# Remove the elements that are out of the current window
while idx_queue and idx_queue[0] <= idx_in - win_size:
idx_queue.popleft()
# Remove all elements smaller than the current element
while idx_queue and in_func(idx_in) >= in_func(idx_queue[-1]):
idx_queue.pop()
# Append the current element to `idx_queue`
idx_queue.append(idx_in)
idx_in += 1
# Repeat the last elements
while idx_out < num_of_elements:
out_func(idx_out, in_func(idx_queue[0]))
idx_out += 1
def compute_coarse_map_slow(grid_map: Grid2D, win_size: int) -> Grid2D:
num_of_cells = grid_map.num_of_cells_x() * grid_map.num_of_cells_y()
buffer = [0 for _ in range(num_of_cells)]
coarse_map = Grid2D(grid_map.resolution(), *grid_map.center_pos(),
grid_map.num_of_cells_x(), grid_map.num_of_cells_y(),
grid_map.log_odds_hit(), grid_map.log_odds_miss())
def get_buffer(idx_x: int, idx_y: int) -> int:
return buffer[idx_y * grid_map.num_of_cells_x() + idx_x]
def set_buffer(idx_x: int, idx_y: int, value: int) -> None:
buffer[idx_y * grid_map.num_of_cells_x() + idx_x] = value
def set_coarse_map(idx_x: int, idx_y: int, value: int) -> None:
coarse_map.set_index_value(idx_x, idx_y, value)
# Sliding window maximum for y-axis
for x in range(grid_map.num_of_cells_x()):
in_func_row = lambda y: grid_map.get_index_value(x, y)
out_func_row = lambda y, max_value: set_buffer(x, y, max_value)
sliding_window_max(in_func_row, out_func_row, \
grid_map.num_of_cells_y(), win_size)
# Sliding window maximum for x-axis
for y in range(grid_map.num_of_cells_y()):
in_func_col = lambda x: get_buffer(x, y)
out_func_col = lambda x, max_value: set_coarse_map(x, y, max_value)
sliding_window_max(in_func_col, out_func_col, \
grid_map.num_of_cells_x(), win_size)
return coarse_map
def compute_coarse_map_fast(grid_map: Grid2D, win_size: int) -> Grid2D:
num_of_cells_x = grid_map.num_of_cells_x()
num_of_cells_y = grid_map.num_of_cells_y()
num_of_cells = num_of_cells_x * num_of_cells_y
buffer = [0 for _ in range(num_of_cells)]
coarse_map = Grid2D(grid_map.resolution(), *grid_map.center_pos(),
grid_map.num_of_cells_x(), grid_map.num_of_cells_y(),
grid_map.log_odds_hit(), grid_map.log_odds_miss())
# Sliding window maximum for y-axis
for x in range(num_of_cells_x):
idx_queue, idx_in, idx_out = deque(), 0, 0
while idx_in < win_size:
while idx_queue and grid_map.get_index_value(x, idx_in) >= \
grid_map.get_index_value(x, idx_queue[-1]):
idx_queue.pop()
idx_queue.append(idx_in)
idx_in += 1
while idx_in < num_of_cells_y:
buffer[idx_out * num_of_cells_x + x] = \
grid_map.get_index_value(x, idx_queue[0])
idx_out += 1
while idx_queue and idx_queue[0] <= idx_in - win_size:
idx_queue.popleft()
while idx_queue and grid_map.get_index_value(x, idx_in) >= \
grid_map.get_index_value(x, idx_queue[-1]):
idx_queue.pop()
idx_queue.append(idx_in)
idx_in += 1
while idx_out < num_of_cells_y:
buffer[idx_out * num_of_cells_x + x] = \
grid_map.get_index_value(x, idx_queue[0])
idx_out += 1
# Sliding window maximum for x-axis
for y in range(num_of_cells_y):
idx_queue, idx_in, idx_out = deque(), 0, 0
idx_offset = y * num_of_cells_x
while idx_in < win_size:
while idx_queue and buffer[idx_offset + idx_in] >= \
buffer[idx_offset + idx_queue[-1]]:
idx_queue.pop()
idx_queue.append(idx_in)
idx_in += 1
while idx_in < num_of_cells_x:
coarse_map.set_index_value(
idx_out, y, buffer[idx_offset + idx_queue[0]])
idx_out += 1
while idx_queue and idx_queue[0] <= idx_in - win_size:
idx_queue.popleft()
while idx_queue and buffer[idx_offset + idx_in] >= \
buffer[idx_offset + idx_queue[-1]]:
idx_queue.pop()
idx_queue.append(idx_in)
idx_in += 1
while idx_out < num_of_cells_x:
coarse_map.set_index_value(
idx_out, y, buffer[idx_offset + idx_queue[0]])
idx_out += 1
return coarse_map
def compute_coarse_map(grid_map: Grid2D, win_size: int) -> Grid2D:
return compute_coarse_map_fast(grid_map, win_size)続いて、分枝限定法によるスキャンマッチングの実装(ScanMatcherBranchBoundクラス)を示します。 ScanMatcherBranchBoundクラスのソースコードはこちらを参照してください。 アルゴリズムの説明は大変でしたが、実装自体は100行程度で済みます。
window_size_x、window_size_y、window_size_thetaの3つのメンバ、\(\theta\)方向のステップサイズの最小値\(\delta_{\theta, \mathrm{min}}\)をmin_step_thetaメンバ、ノードの最大の高さ\(h_0\)をmax_node_heightメンバ、\(2^{h_0}\)をmax_strideメンバに格納します。compute_step()メソッドは、占有格子地図の解像度\(r\)と、スキャンデータ\(\mathcal{S}\)を基に、\(x\)、\(y\)、\(\theta\)方向のステップサイズ(\(r\)および\(\delta_\theta\))を計算します。 \[
\delta_\theta = \max \left( \delta_{\theta, \mathrm{min}}, \arccos \left( 1 - \frac{r^2}{2 d_\mathrm{max}^2} \right) \right)
\] \(d_\mathrm{max}\)は、LiDARセンサの中心から、スキャン点までの距離の最大値です。 スキャンデータ\(\mathcal{S} = \left\{ (r_1, \theta_1), \ldots, (r_N, \theta_N) \right\}\)について、\(d_\mathrm{max} = \max_i r_i\)となります。compute_window()メソッドは、探索領域のサイズ\(W_x, W_y, W_\theta\)とステップサイズ\(r, \delta_\theta\)を基に、各軸方向の解の候補数\(w_x, w_y, w_\theta\)を計算します。 \[
w_x = \left\lceil \frac{W_x}{r} \right\rceil, \
w_y = \left\lceil \frac{W_y}{r} \right\rceil, \
w_\theta = \left\lceil \frac{W_\theta}{\delta_\theta} \right\rceil
\]compute_score()メソッドは、指定されたインデックスの格子がもつ占有確率を足し合わせて、スコアを計算します(詳細は後ほど説明します)。match_scan()メソッドは、分枝限定法によるスキャンマッチングの本体です。 以前のページの末尾に示したアルゴリズムと照らし合わせて、ソースコードを詳しくみてみましょう。
引数initial_pose、grid_map、scanから、探索領域の中心に対応する姿勢\(\mathbf{\xi}_0 = \left[ \xi_{0, x}, \xi_{0, y}, \xi_{0, \theta} \right]^\top\)、占有格子地図\(\mathcal{M}\)(解像度\(r\))、スキャンデータ\(\mathcal{S}\)を受け取ります。 以前のページでは、スキャンデータは極座標形式(距離\(r_i\)と方向\(\theta_i\))で表現していましたが、この実装では直交座標(\(x, y\))を用いています。 あるスキャンが極座標で\(\mathbf{z}_i = (r_i, \theta_i)\)のように表されるとき、\((r_i \cos \theta_i, r_i \sin \theta_i)\)とすれば直交座標に変換できます。 また、直交座標で\(\mathbf{z}_i = (x_i, y_i)\)のように表されるとき、\((\sqrt{x_i^2 + y_i^2}, \arctan \cfrac{y_i}{x_i})\)とすれば極座標に変換できます。
最初に、compute_step()メソッドとcompute_window()メソッドを使って、ステップサイズ\(r, \delta_\theta\)と探索領域のサイズ\(w_x, w_y, w_\theta\)を計算します。 変数step_x、step_y、step_thetaは、\(r\), \(r\), \(\delta_\theta\)に対応します。 また変数win_x、win_y、win_thetaは、\(w_x\)、\(w_y\)、\(w_\theta\)に対応します。 スコアの最大値\(s^*\)と最適解\((j_x^*, j_y^*, j_\theta^*) \in \overline{\mathcal{W}}\)は、変数best_score、best_x、best_y、best_thetaにそれぞれ保持します。 以前のページでは、次のように探索領域\(\overline{\mathcal{W}}\)を定義していました。 \[
\overline{\mathcal{W}} = \left\{ 0, \ldots, 2w_x \right\}
\times \left\{ 0, \ldots, 2w_y \right\}
\times \left\{ 0, \ldots, 2w_\theta \right\}
\] \[
\mathcal{W} = \left\{ \mathcal{\xi}_0
+ \left[ r \left( -w_x + j_x \right), r \left( -w_y + j_y \right),
\delta_\theta \left( -w_\theta + j_\theta \right) \right]^\top \mid
\left( j_x, j_y, j_\theta \right) \in \overline{\mathcal{W}} \right\}
\] このメソッド内では、以下の定義を採用しています(上記の\(j_x, j_y, j_\theta\)を、\(j_x - w_x, j_y - w_y, j_\theta - w_\theta\)に置き換えただけです)。 \[
\overline{\mathcal{W}} = \left\{ -w_x, \ldots, w_x - 1\right\}
\times \left\{ -w_y, \ldots, w_y - 1\right\}
\times \left\{ -w_\theta, \ldots, w_\theta - 1\right\}
\] \[
\mathcal{W} = \left\{ \mathcal{\xi}_0
+ \left[ r j_x, r j_y, \delta_\theta j_\theta \right]^\top \mid
\left( j_x, j_y, j_\theta \right) \in \overline{\mathcal{W}} \right\}
\]
続いて、compute_coarse_map()メソッドを使って、与えられた地図\(\mathcal{M}\)から、\(h_0\)個の地図\(\mathcal{M}_\mathrm{precomp}^1, \ldots, \mathcal{M}_\mathrm{precomp}^{h_0}\)を計算します。 元々の地図\(\mathcal{M}\)と、計算した地図\(\mathcal{M}_\mathrm{precomp}^h\)をまとめて、変数grid_mapsに格納します。 \[
\mathcal{M}_\mathrm{precomp}^h(i, j)
= \max_{\substack{i \le i' < i + 2^h \\ j \le j' < j + 2^h}} \mathcal{M}(i', j')
\]
その後、優先度付きキュー\(\mathcal{C}\)を作成します(ここでは優先度付きキューを用いましたが、単なるスタックで良いと思います)。 これは変数node_queueに対応します。 優先度付きキュー\(\mathcal{C}\)を、高さ\(h_0\)の一連のノード\(\mathcal{C}_0\)で初期化します(探索領域の定義が少し異なるので、それに応じて\(\overline{\mathcal{W}}_0\)と\(\mathcal{C}_0\)の定義も変えています)。 ソースコードは変数x、y、tの3重ループになっていますが、\(\overline{\mathcal{W}}_{0, x}\)、\(\overline{\mathcal{W}}_{0, y}\)、\(\overline{\mathcal{W}}_{0, \theta}\)の各要素を順に辿っているわけです。 \[
\begin{eqnarray}
\overline{\mathcal{W}}_{0, x} &=& \left\{ -w_x + 2^{h_0} j_x \mid
j_x \in \mathbb{Z}, 0 \le 2^{h_0} j_x < 2 w_x \right\} \\
\overline{\mathcal{W}}_{0, y} &=& \left\{ -w_y + 2^{h_0} j_y \mid
j_y \in \mathbb{Z}, 0 \le 2^{h_0} j_y < 2 w_y \right\} \\
\overline{\mathcal{W}}_{0, \theta} &=& \left\{ j_\theta \mid
j_\theta \in \mathbb{Z}, -w_\theta \le j_\theta < w_\theta \right\} \\
\mathcal{C}_0 &=& \overline{\mathcal{W}}_{0, x}
\times \overline{\mathcal{W}}_{0, y}
\times \overline{\mathcal{W}}_{0, \theta}
\times \left\{ h_0 \right\}
\end{eqnarray}
\] 各ノード\(\mathbf{c} = \left( -w_x + 2^{h_0} j_x, -w_y + 2^{h_0} j_y, j_\theta, h_0 \right) \in \mathcal{C}_0\)について、append_node()関数を呼び出します。 引数x、y、tは、\(-w_x + 2^{h_0} j_x\)、\(-w_y + 2^{h_0} j_y\)、\(j_\theta\)に対応します。 また引数heightは\(h_0\)、引数indicesは以下で定義するインデックス\(\{ (I_{i, x}^0, I_{i, y}^0) \}\)に対応します。 append_node()関数内では、スコアの上界\(\overline{s}(\mathbf{c})\)を次のような手順で計算し、変数scoreに格納します。 最初に、解の候補\((0, 0, j_\theta)\)に対応する姿勢\(\mathbf{\xi}(0, 0, j_\theta)\)を計算し、変数poseに格納します。 \[
\mathbf{\xi}(0, 0, j_\theta)
= \mathbf{\xi}_0 + \left[ 0, 0, \delta_\theta j_\theta \right]^\top
= \left[ \xi_{0, x}, \xi_{0, y},
\xi_{0, \theta} + \delta_\theta j_\theta \right]^\top
\] この姿勢\(\mathbf{\xi}(0, 0, j_\theta)\)を基に、スキャン点\(\mathbf{z}_i = (r_i, \theta_i)\)に対応する地図上の格子のインデックス\((I_{i, x}^0, I_{i, y}^0)\)を計算し、変数indicesに格納します。 \[
\begin{eqnarray}
I_{i, x}^0 &=& \left\lfloor \frac{\xi_{0, x} + r_i \cos \left(
\xi_{0, \theta} + \delta_\theta j_\theta
+ \theta_i \right)}{r} \right\rfloor \\
I_{i, y}^0 &=& \left\lfloor \frac{\xi_{0, y} + r_i \sin \left(
\xi_{0, \theta} + \delta_\theta j_\theta
+ \theta_i \right)}{r} \right\rfloor
\end{eqnarray}
\] その後compute_score()メソッドを用いて、スコアの上界\(\overline{s}(\mathbf{c})\)を計算します。 compute_score()メソッドの引数grid_mapは\(\mathcal{M}_\mathrm{precomp}^{h_0}\)、indicesはインデックス\(\{ (I_{i, x}^0, I_{i, y}^0) \}\)、またoffsetは\((-w_x + 2^{h_0} j_x, -w_y + 2^{h_0} j_y)\)にそれぞれ対応しています。 \[
\overline{s}(\mathbf{c}) = \sum_{i = 1}^N
\mathcal{M}_\mathrm{precomp}^{h_0}(I_{i, x}^0 - w_x + 2^{h_0} j_x,
I_{i, y}^0 - w_y + 2^{h_0} j_y)
\] スコアの上界\(\overline{s}(\mathbf{c})\)が最も高いノード\(\mathbf{c} \in \mathcal{C}_0\)が先頭に来るように、\(\mathcal{C}_0\)に含まれる全てのノードを優先度付きキュー\(\mathcal{C}\)に追加していきます。 優先度付きキューには、ノード\(\mathbf{c}\)の4つのパラメータ\((-w_x + 2^{h_0} j_x, -w_y + 2^{h_0} j_y, j_\theta, h_0)\)(変数x、y、theta、height)のほかに、スコアの上界\(\overline{s}(\mathbf{c})\)(変数score)、そしてインデックス\(\{ (I_{i, x}^0, I_{i, y}^0) \}\)(変数indices)も追加しておきます。
優先度付きキュー\(\mathcal{C}\)(変数node_queue)が空になるまで、以下の処理を繰り返します。
\(\mathcal{C}\)の先頭から、ノード\(\mathbf{c} = (c_x, c_y, c_\theta, h) \in \overline{\mathcal{W}}\)とスコアの上界\(\overline{s}(\mathbf{c})\)、そしてインデックス\(\{ (I_{i, x}^0, I_{i, y}^0) \}\)を取得します。 \((I_{i, x}^0, I_{i, y}^0)\)は、姿勢\(\mathbf{\xi}(0, 0, c_\theta)\)のもとで計算した、スキャン点\(\mathbf{z}_i = (r_i, \theta_i)\)に対応する格子のインデックスです(上記の説明を確認してください)。 \(c_x, c_y, c_\theta, h\)は変数x、y、t、height、上界\(\overline{s}(\mathbf{c})\)は変数score、またインデックス\(\{ (I_{i, x}^0, I_{i, y}^0) \}\)は変数indicesに格納されます。
スコアの上界\(\overline{s}(\mathbf{c})\)が、現在の最大スコア\(s^*\)(変数best_score)以下であれば、現在のノード\(\mathbf{c}\)と、その子ノードの探索は不要です(枝刈り)。
現在のノード\(\mathbf{c}\)が葉ノードである場合(高さ\(h = 0\))は、現在の最大スコア\(s^*\)(変数best_score)を\(\overline{s}(\mathbf{c})\)、また最適解\((j_x^*, j_y^*, j_\theta^*)\)(変数best_x、best_y、best_theta)を\((c_x, c_y, c_\theta)\)で更新します。
現在のノード\(\mathbf{c}\)が葉ノードでなければ、4つの子ノード\(\mathbf{c}_1, \mathbf{c}_2, \mathbf{c}_3, \mathbf{c}_4\)に分割します。 \[
\begin{eqnarray}
\mathbf{c}_1 &=& (c_x, c_y, c_\theta, h - 1) \\
\mathbf{c}_2 &=& (c_x + 2^{h - 1}, c_y, c_\theta, h - 1) \\
\mathbf{c}_3 &=& (c_x, c_y + 2^{h - 1}, c_\theta, h - 1) \\
\mathbf{c}_4 &=& (c_x + 2^{h - 1}, c_y + 2^{h - 1}, c_\theta, h - 1)
\end{eqnarray}
\] 変数new_x、new_y、new_height、sは、\(c_x, c_y, h - 1, 2^{h - 1}\)にそれぞれ対応します。 4つの子ノードに対してappend_node()関数が順に呼び出されます。 append_node()関数内では、スコアの上界\(\overline{s}(\mathbf{c}_1), \overline{s}(\mathbf{c}_2), \overline{s}(\mathbf{c}_3), \overline{s}(\mathbf{c}_4)\)を計算します。 \[
\begin{eqnarray}
\overline{s}(\mathbf{c}_1)
&=& \sum_{i = 1}^N \mathcal{M}_\mathrm{precomp}^{h - 1}(
I_{i, x}^0 + c_x, I_{i, y}^0 + c_y) \\
\overline{s}(\mathbf{c}_2)
&=& \sum_{i = 1}^N \mathcal{M}_\mathrm{precomp}^{h - 1}(
I_{i, x}^0 + c_x + 2^{h - 1}, I_{i, y}^0 + c_y) \\
\overline{s}(\mathbf{c}_3)
&=& \sum_{i = 1}^N \mathcal{M}_\mathrm{precomp}^{h - 1}(
I_{i, x}^0 + c_x, I_{i, y}^0 + c_y + 2^{h - 1}) \\
\overline{s}(\mathbf{c}_4)
&=& \sum_{i = 1}^N \mathcal{M}_\mathrm{precomp}^{h - 1}(
I_{i, x}^0 + c_x + 2^{h - 1}, I_{i, y}^0 + c_y + 2^{h - 1}) \\
I_{i, x}^0 &=& \left\lfloor \frac{\xi_{0, x} + r_i \cos \left(
\xi_{0, \theta} + \delta_\theta c_\theta
+ \theta_i \right)}{r} \right\rfloor \\
I_{i, y}^0 &=& \left\lfloor \frac{\xi_{0, y} + r_i \sin \left(
\xi_{0, \theta} + \delta_\theta c_\theta
+ \theta_i \right)}{r} \right\rfloor
\end{eqnarray}
\] 4つの子ノードは、親ノード\(\mathbf{c}\)と同様の回転\(c_\theta\)を表しています。 従って、スコアの上界の計算時にインデックス\(\{ (I_{i, x}^0, I_{i, y}^0) \}\)を再利用できます。 LiDAR座標系から地図座標系への座標変換と、地図座標から格子のインデックスへの変換の2つを省略できます。 上界の最も大きな子ノードが先頭に来るように、4つの子ノードを優先度付きキューに追加していきます(ノードの4つのパラメータに加えて、上界とインデックスも一緒に追加)。
上記の手続きによって最適解\((j_x^*, j_y^*, j_\theta^*) \in \overline{\mathcal{W}}\)が得られたので、最適な姿勢\(\mathbf{\xi}^* \in \mathcal{W}\)を計算します(変数best_pose)。 \[
\mathbf{\xi}^* = \left[ \xi_{0, x} + r j_x^*, \xi_{0, y} + r j_y^*,
\xi_{0, \theta} + \delta_\theta j_\theta^* \right]^\top \in \mathcal{W}
\]
スコアの最大値\(s^*\)、最適解\((j_x^*, j_y^*, j_\theta^*) \in \overline{\mathcal{W}}\)、最適な姿勢\(\mathbf{\xi}^* \in \mathcal{W}\)などをまとめて返します。
# coding: utf-8
# scan_matcher_branch_bound.py
import heapq
import math
from typing import Any, List, Tuple
from grid_2d import Grid2D, compute_coarse_map
from point_2d import Point2D
from pose_2d import Pose2D, project_point_2d, wrap_angle
class ScanMatcherBranchBound(object):
"""`ScanMatcherBranchBound` class implements branch-and-bound scan matching,
which aligns a LiDAR scan and a 2D occupancy grid map. \n
For more details, please refer to the following paper: \n
Wolfgang Hess, Damon Kohler, Holger Rapp, and Daniel Andor.
"Real-time Loop Closure in 2D LiDAR SLAM," in Proceedings of the IEEE
International Conference on Robotics and Automation (ICRA), 2016.
"""
class Result(object):
def __init__(self, win: Tuple[int, int, int],
step: Tuple[float, float, float],
best: Tuple[int, int, int], best_score: float,
initial_pose: Pose2D, best_pose: Pose2D,
num_solutions: int, num_processed: int) -> None:
self.win_x, self.win_y, self.win_theta = win
self.step_x, self.step_y, self.step_theta = step
self.best_x, self.best_y, self.best_theta = best
self.best_score = best_score
self.initial_pose = initial_pose
self.best_pose = best_pose
self.num_solutions = num_solutions
self.num_processed = num_processed
def dump(self) -> None:
msg = "Statistics for branch-and-bound scan matcher\n" \
"Window size: ({}, {}, {})\n" \
"Step size: ({:.6f} m, {:.6f} m, {:.6f} rad)\n" \
"Best solution: ({}, {}, {})\n" \
"Best score: {}\n" \
"Initial pose: ({:.6f} m, {:.6f} m, {:.6f} rad)\n" \
"Final pose: ({:.6f} m, {:.6f} m, {:.6f} rad)\n" \
"# of possible solutions: {}\n" \
"# of solutions processed: {}\n"
print(msg.format(self.win_x * 2, self.win_y * 2, self.win_theta * 2,
self.step_x, self.step_y, self.step_theta,
self.best_x, self.best_y, self.best_theta,
self.best_score,
self.initial_pose.x, self.initial_pose.y,
self.initial_pose.theta,
self.best_pose.x, self.best_pose.y,
self.best_pose.theta,
self.num_solutions, self.num_processed))
def __init__(self, window_size_x: float, window_size_y: float,
window_size_theta: float, min_step_theta: float,
max_node_height: int) -> None:
self.window_size_x = window_size_x
self.window_size_y = window_size_y
self.window_size_theta = window_size_theta
self.min_step_theta = min_step_theta
self.max_node_height = max_node_height
self.max_stride = 1 << self.max_node_height
def compute_step(self, grid_map: Grid2D, scan: List[Point2D]):
ranges = [(p.x ** 2 + p.y ** 2) for p in scan]
theta = grid_map.resolution() / max(ranges)
step_x = grid_map.resolution()
step_y = grid_map.resolution()
step_theta = math.acos(1.0 - 0.5 * (theta ** 2))
step_theta = max(step_theta, self.min_step_theta)
return step_x, step_y, step_theta
def compute_window(self, step_x: float, step_y: float, step_theta: float):
return int(math.ceil(0.5 * self.window_size_x / step_x)), \
int(math.ceil(0.5 * self.window_size_y / step_y)), \
int(math.ceil(0.5 * self.window_size_theta / step_theta))
def compute_score(self, grid_map: Grid2D, indices: List[Tuple[int, int]],
offset: Tuple[int, int]) -> int:
score = 0
for idx_base in indices:
idx = (idx_base[0] + offset[0], idx_base[1] + offset[1])
if grid_map.is_index_inside(*idx):
score += grid_map.get_index_value(*idx)
return score
def match_scan(self, initial_pose: Pose2D, grid_map: Grid2D,
scan: List[Point2D]) -> Tuple[Pose2D, Any]:
# Determine the search step and window size
step = self.compute_step(grid_map, scan)
win = self.compute_window(*step)
step_x, step_y, step_theta = step
win_x, win_y, win_theta = win
best_x, best_y, best_theta, best_score = 0, 0, 0, 0
num_solutions = (2 * win_x) * (2 * win_y) * (2 * win_theta)
num_processed = 0
# Compute coarse grid maps, which are analogous to image pyramids
grid_maps = [grid_map]
for i in range(self.max_node_height):
grid_maps.append(compute_coarse_map(grid_map, 2 << i))
# `node_queue` is a priority queue of nodes, where each node represents
# a subregion in the 3D search window along x, y, and theta axes
node_queue = []
def append_node(x: int, y: int, theta: int,
height: int, indices: List[Tuple[int, int]]):
score = self.compute_score(grid_maps[height], indices, (x, y))
if score > best_score:
# Store the negative score as a key, since `heapq.heappop()`
# returns a node with the smallest key
heapq.heappush(node_queue,
(-score, (x, y, theta, height, indices, score)))
# Initialize a priority queue
for t in range(-win_theta, win_theta):
pose = Pose2D(initial_pose.x, initial_pose.y,
initial_pose.theta + t * step_theta)
points = [project_point_2d(pose, p) for p in scan]
indices = [grid_map.point_to_index(p) for p in points]
for y in range(-win_y, win_y, self.max_stride):
for x in range(-win_x, win_x, self.max_stride):
append_node(x, y, t, self.max_node_height, indices)
while node_queue:
# Get the node from the priority queue
_, (x, y, t, height, indices, score) = heapq.heappop(node_queue)
num_processed += 1
if score <= best_score:
# Skip the node if the score is below the best score so far
continue
if height == 0:
# If the current node is a left, then update the solution
best_x, best_y, best_theta, best_score = x, y, t, score
else:
# Otherwise, split the current node into four new nodes
new_x, new_y, new_height = x, y, height - 1
# Compute a new stride
s = 1 << new_height
append_node(new_x, new_y, t, new_height, indices)
append_node(new_x + s, new_y, t, new_height, indices)
append_node(new_x, new_y + s, t, new_height, indices)
append_node(new_x + s, new_y + s, t, new_height, indices)
best_pose = Pose2D(initial_pose.x + best_x * step_x,
initial_pose.y + best_y * step_y,
initial_pose.theta + best_theta * step_theta)
best_pose.theta = wrap_angle(best_pose.theta)
result = ScanMatcherBranchBound.Result(
win, step, (best_x, best_y, best_theta), best_score,
initial_pose, best_pose, num_solutions, num_processed)
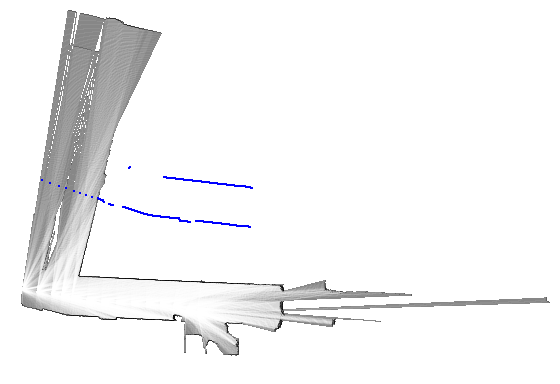
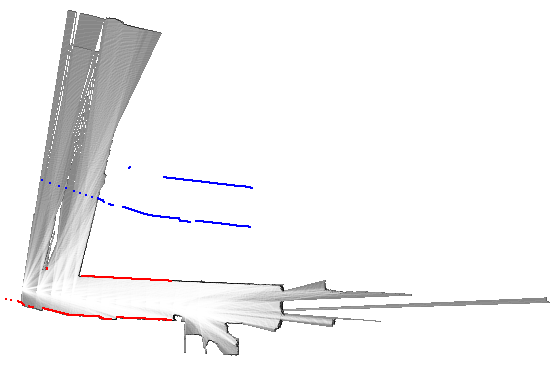
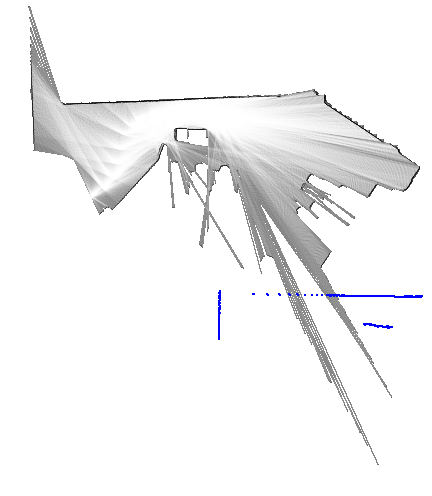
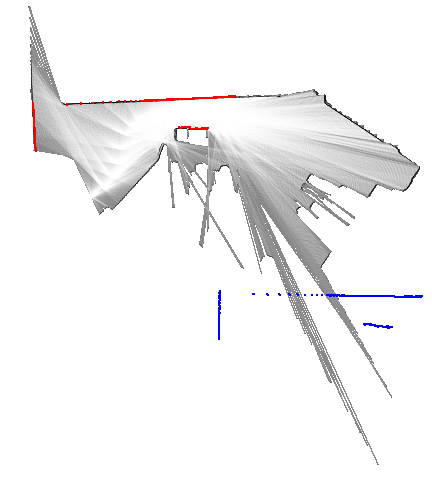
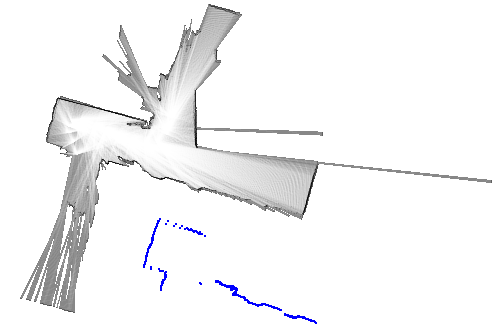
return best_pose, resultその他の実装はGitHubのリポジトリを参照してください。 ここでは幾つかのデータセットを使った動作例を示します。 青色で示したスキャンは、姿勢の初期値を使って地図上に投影したものです(match_scan()メソッドの引数initial_pose)。 また赤色で示したスキャンは、姿勢の解を使って描画しています(match_scan()メソッドの変数best_pose)。
初期値と最適解がかなり大きく離れていますが、正しく動作していることが分かります。 ガウス・ニュートン法やレーベンバーグ・マーカート法などの、勾配を基にした逐次的なマッチング手法では、最適解への収束は期待できないでしょう。
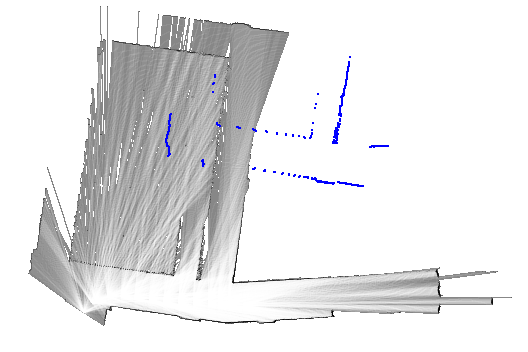
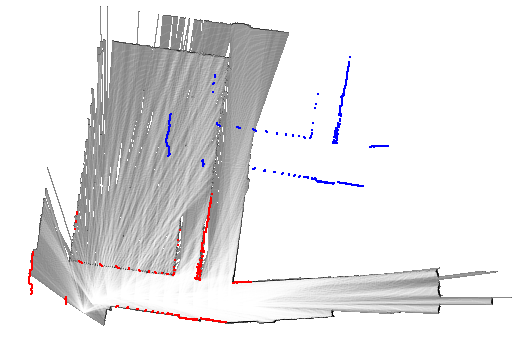
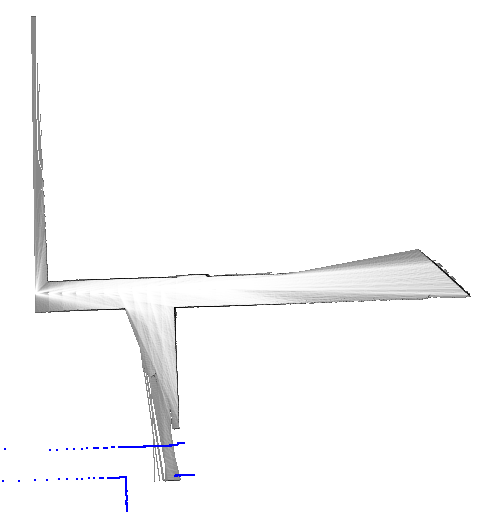
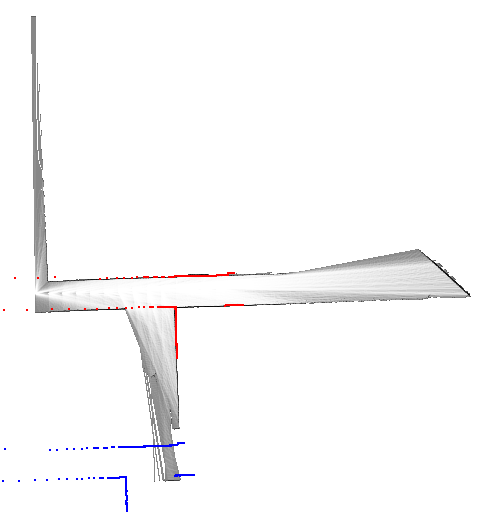
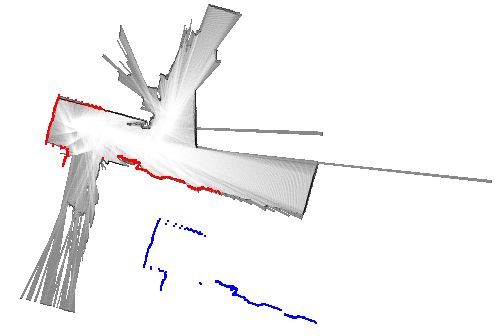
データセット18の例では、探索範囲のサイズを\(25 \mathrm{m} \times 25 \mathrm{m} \times 0.2 \mathrm{rad}\)、ステップサイズを\(0.05 \mathrm{m}, 0.0025 \mathrm{rad}\)に設定しているので、20,000,000個もの解の候補が存在します。 しかし、分枝限定法で調べたノード数は11,252だったので(ノードの高さは最大6に設定)、解の候補のうちたったの0.056%を探索するだけで済んでいます。 言い換えると、全ての解の候補をしらみつぶしに調べる場合と比べて、1,777倍高速化されているということです。
これらを試すには、リポジトリ内のmain.pyを実行してください。 main()関数の先頭に書かれている変数data_idxは、データセットの番号(7、8、18、25、32のいずれか)を表します。 また変数perturb_x、perturb_y、perturb_thetaは、初期値を最適解からどれだけ移動させるかを決定します。